The ship's HSMS (hull stress monitoring system) is an essential part of modern ship design. The system can help the captain monitor and analyze the stress situation of the ship in real-time, discover abnormal situations in a timely manner, take effective measures, reduce marine accidents, and improve the safety and reliability of the ship. This article will introduce the basic principles, components, common problems, and management points of the ship's HSMS. Through effective operation and maintenance, the efficiency of ship operation can be improved.
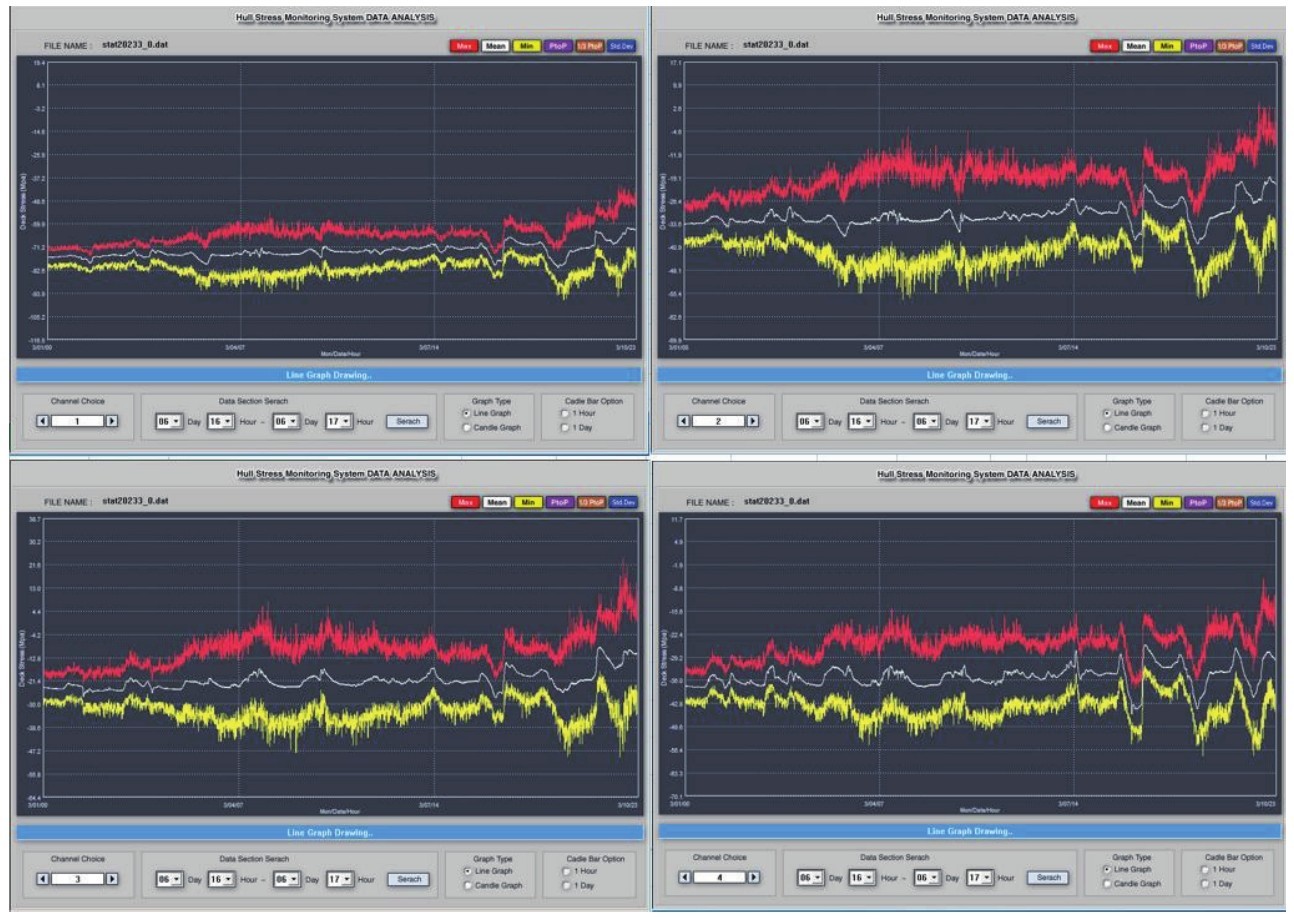
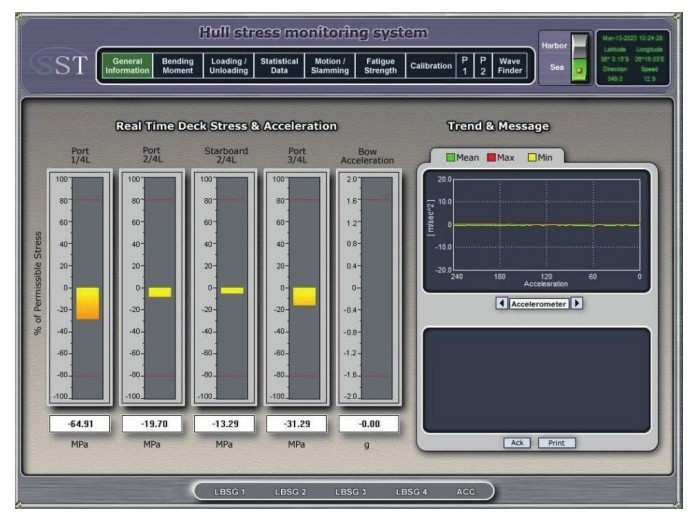
船体应力监测系统[3]采取模块化管理(图9),在主界面数据总览(General information)上可以查看包括传感器名称和位置的显示,实际数值和报警值的设置,报警信息的显示,过去四小时内传感器监测的最大、最小和平均数值的显示,以及选择菜单以更换传感器;弯距状态(Bending moment)模块监测船体梁弯矩,包括静水和海浪弯矩,每分钟记录一次,记录过去四小时的数据。根据海况和船舶状态,设定最大允许弯矩。如果实测应力超出允许范围,外部报警器将会触发。装卸货状态(Loading AND Unloading)模块可以通过配载仪自动或手动传输弯矩数据,将装卸货作业时的弯矩曲线显示出来,并将实测弯矩与预测结果进行比较。
图9 船体应力监测系统监控界面
统计数据(Statistical Data)模块对各传感器进行数据统计,记录过去五分钟的数据,并将结果存储在电脑上。此外,还可以选择时间段,查看各传感器的历史信息;动态和抨击(Motion and Slamming)模块显示船舶运动引起的纵摇角、平均纵摇周期、横摇角、平均横摇周期,并以动画形式展示运动和抨击画面。疲劳强度(Fatigue Strength)模块显示累积应力循环,右侧显示疲劳损伤比;